
To Whither and Wherefore not Wheels?
Our intuitive risk assessments run skewed. Using myself as a hopelessly helpless target, I once had the pleasure of walking across a glass floor in a tower high above a baseball stadium. Along with all of my fellow visitors, I skittered and scampered from metal platform to metal platform, trying to avoid staying on the transparent glass floors. Never mind that the glass floor provided perfect soaring box office views to the game far below. But a moment's thought revealed that the (much thicker) glass platforms were technically harder and more secure than the (much thinner) steel plates. Fooled by the visual false cliff experimental setup.
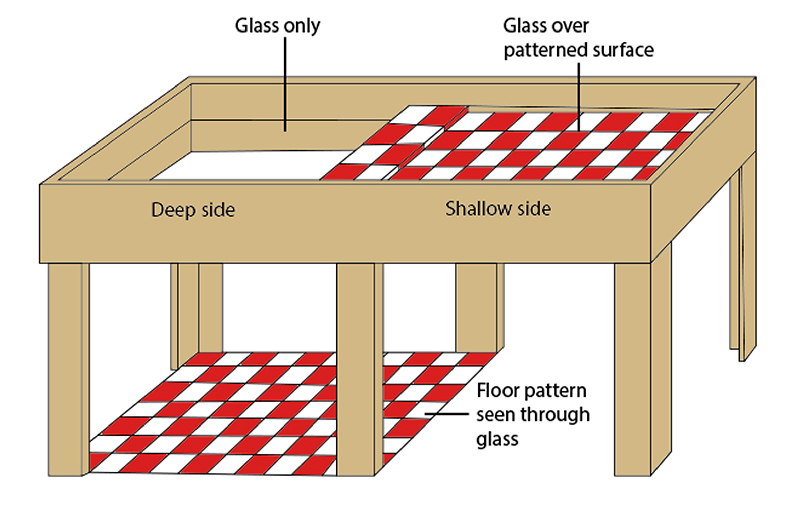
Figure 1. Visual false cliff from the Gibson & Walk (1960) study.
Like the proverbial ostrich with its head in the ground, just because something is opaque does not mean it is safer. Or, as the military might put it, the thin metal platform does concealment, but the thick glass platform does better at cover. The first blocks the enemies' sight; the second blocks the enemies' bullets. Perhaps we value or focus our attention on the wrong target.
So it is with recent advancements in robotic walking technology. Boston Dynamics, for example, recently released a fun video about their latest Atlas bipedal robot.
It is a very entertaining skit and does a great job showcasing their product capabilities. Even more kudos to the company and team for honestly teaching us about the challenges they encountered in making the video.
Boston Dynamics' Atlas is arguably one of the most advanced and agile robot designs in the world. To see it in action is to ponder the age-old ponder - "when will robots replace humans?" Or to insert a more doomsday Terminator-like flavor, "when will robots terminate humans?"
It is a wonderful false cliff glass floor indeed.
In order to proceed further, first we need some background without which we could be trapped into facetiously focusing on the number of joints (28) or how fast it jogs (2.5 m/s) in a race with humanity on some random Key Performance Indicator over time. In which case we are mired into thinking it is only be a matter of time before the robots catch up and surpass humanity. So the first question to plant in our attention is this: ceteris paribus, would Atlas be less human if it had wheels instead of legs?
To understand a platform like Atlas, a brief foray into the company philosophy and design is in order. Boston Dynamics spun off from a fellow Massachusetts Institute of Technology Leg Lab to design walking legs. Here is a brief summary video of their design history. It helps to explain why they rely on hydraulic joints instead of servo motors, for example. In short: a hopping pogo stick presents a valid approach to dynamically balancing top heavy loads on very few supports. They have very real future challenges not directly related to the sciences of designing legs, but at least tangentially related to their existential purpose of why they are using legs. (The fate of Boston Dynamics - TechTalks (bdtechtalks.com), These Robots Run, Dance and Flip. But Are They a Business? - The New York Times (nytimes.com))
These issues echo another advanced robotics team, this time from Honda's ASIMO. (ASIMO by Honda | The World's Most Advanced Humanoid Robot) While retired, the ASIMO design still impresses (Even as It Retires, ASIMO Still Manages to Impress - IEEE Spectrum) and inspires continuing work at Honda in modified designs for different purposes. It was telling that in the wake of the 2011 Fukushima disaster, the primary robots on the scene were tracked (wheeled) iRobot Packbots. The ASIMO team declined to send in a walking ASIMO, but did recycle advanced arm designs to be quickly placed on… a wheeled robot.
Perhaps most telling of all is that both leaders - Atlas and ASIMO - have car manufacturing companies as parent companies, Hyundai and Honda respectively. This helps to shed light on the fact that the primary goal of a robot as of modern times is as a moving delivery vehicle.
This leads us to this claim: Atlas and ASIMO are not like walking humans.
Rather, they are walking cars.
So the second general question to plant in our minds is to ask what is the difference between legs and wheels? Or to put it another way, would humans be less human if we had wheels instead of legs? Both questions of course lead to the main question: What factor exactly makes Atlas or ASIMO seem human and is it fair to make it seem so?
To gain insight into this issue, we proceed with a thought experiment. Let us sandbox play as robotics engineers and design a wheeled human before evolving him into a legged human to see what difference it makes. With apologies to da Vinci's Vitruvian Man:
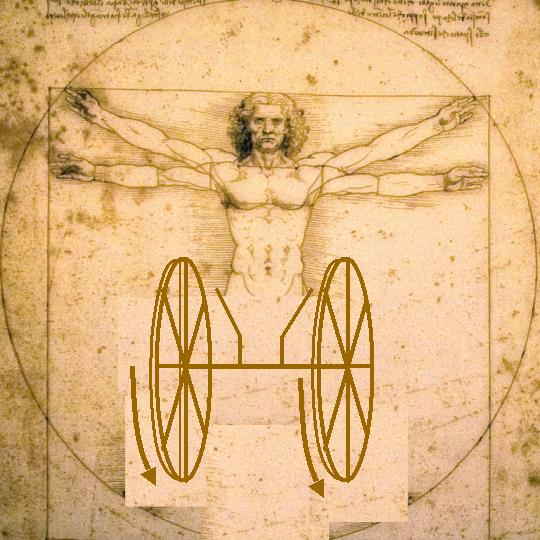
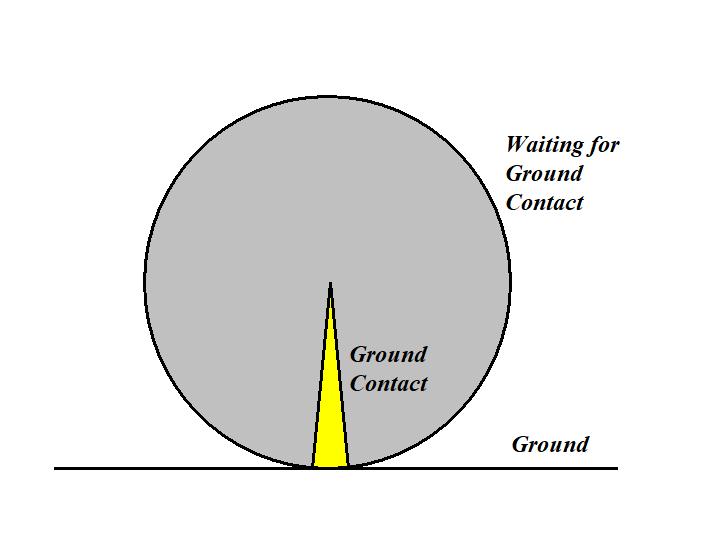
Figure 2: This is a 2-wheeled human. His wheels are 1-meter radius circles. His lateral center of gravity is centered between the wheels such that both wheels contact the ground at all times.
Materials:
1 axle
2x1-meter radius wheels
Turning the Vitruvian Man into a Segway 2-wheeled balancing scooter abomination possibly comes with some benefits. He can attain high cruising speeds owing to a wheeled design, though it would be very cumbersome in tight environments. The main issue is that the wheels are fixed size and only a small portion (5%) is in use with ground contact at any given moment. The remaining 95% is wasted space that only serves to get jammed in doorways or tree branches. Trimming some excess material from the wheels evolves to version 2:
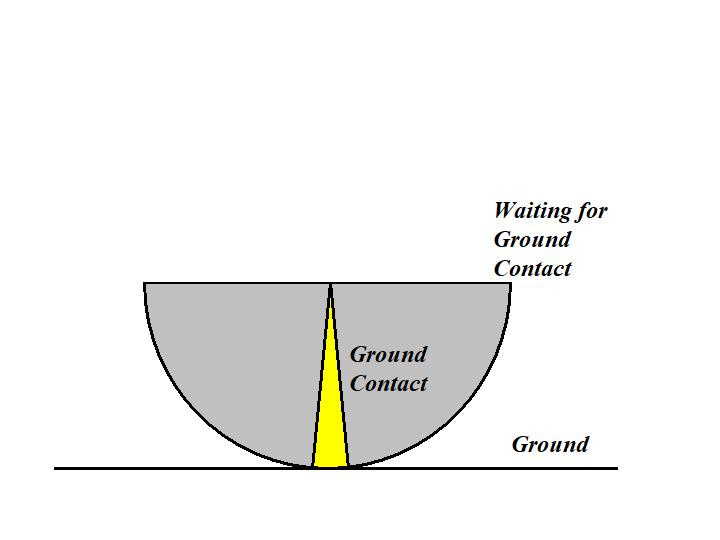
Figure 3: This is a 2-semi-wheeled human. His wheels are 1-meter radius semi-circles. His lateral center of gravity must alternate from side to side like a figure skater or cross country skier so as to allow time for the non-ground-contact side to rotate forward into position.
Materials:
1 axle
2x1-meter radius half-wheels
1 waist servo
Removing half of each wheel removes a lot of extraneous material. This requires the addition of a tilt servo to shift the center of gravity from side to side whenever the opposite wheel runs to an edge. The half-wheels must take turns bearing the entire body weight until the opposite wheel has time to rotate back into position. While this model only partially solves the wasted material cost (50%), the ability to elegantly balance from side to side could help him to negotiate narrow tracks and even climb stair-like obstacles. The primary purpose though is to illustrate that half-wheels still operate like and provide similar benefits to a whole wheel. Moving towards its extreme, trimming the wheel further evolves to version 3:
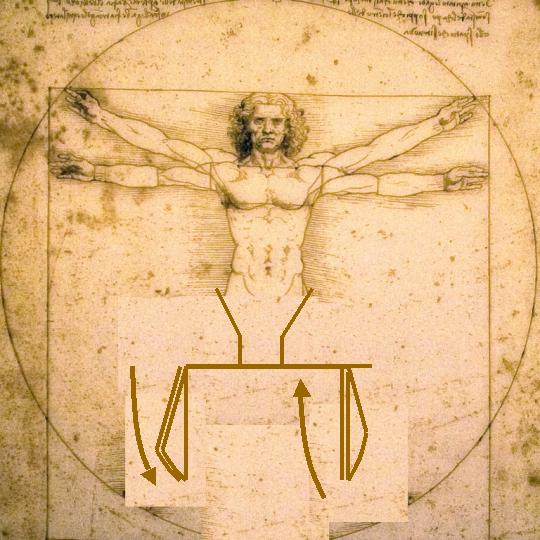
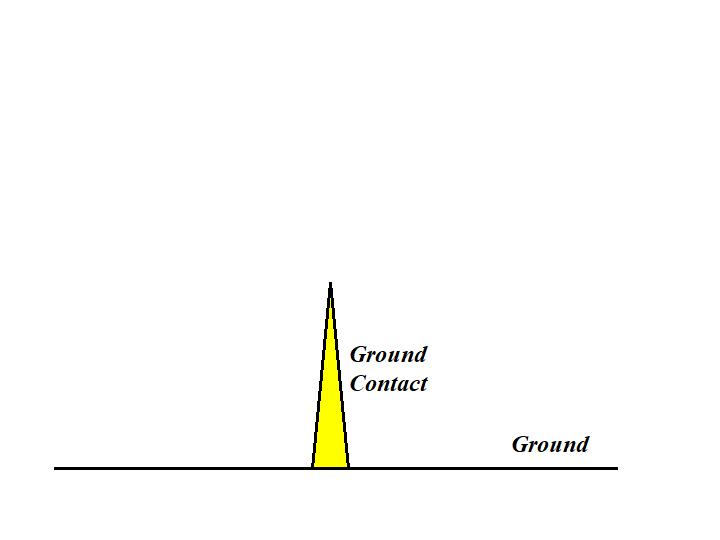
Figure 4: This is a 2-arc human. His wheels are now 1-meter radius 15-degree arcs. His lateral center of gravity must alternate from side to side like a figure skater or cross country skier so as to allow time for the non-ground-contact side to rotate backwards into position.
Materials:
2-way Axle allowing independent rotations
2x1-meter radius arcs
1 waist servo
Trimming the wheels to the bare minimum for ground contact removes all extraneous material while allowing for each arc to serve as "just-in-time" wheels. As the left arc-wheel bears the entire body weight, the right arc-wheel rotates either the same direction above and around at high speed to catch its turn or simply rotates the opposite direction like a pendullum to get in position for its turn to bear the weight. Regardless, from the ground's perspective, there are 2 full wheels above alternating rolling contacts with the ground. But from the body's perspective, these are already stilted, stiff-jointed legs. Voila - legs to wheels to legs.
So what is the benefit of having legs over wheels or wheels over legs? What is the difference? Fundamentally nothing. They are functionally equivalent. Of course there are differences - when considering dynamically expanding or contracting wheel radii, it is easier to add a knee joint as opposed to making pneumatically telescoping radial spokes. And legs compact far better and easier when not in use as opposed to wheels. But otherwise, the choice of legs or wheels should have no effect as a stand-alone factor in determining human-ness. Atlas or ASIMO could replace their legs with wheels - again, no surprise they originate or attract investment from car companies - and they would still be Atlas and ASIMO, albeit a little stiffer and less flexible. They would be no more human for having legs nor less human for having wheels.
Put another way, Atlas, ASIMO, and other legged robots are more advanced versions of robotic remote controlled cars. They may increase their power, torque, height, turning motions, and cargo capacity to far exceed human limits, but these do not fundamentally change their role. Their role is to deliver cargo from point A to point B on demand. How they do so is irrelevant. Any organization is free to replace humans with remote controlled cars, walking or wheeled - we have all seen worse business choices. But this would not be robots taking over jobs. It would be human managers making questionable choices.
So if we categorically reject the notion that legs on a robot make a human-like robot, we understand that traversing anywhere along the wheel-to-leg advancement scale has no effect on human-ness. A rolling log is not human. A chariot is not human. A horse and carriage is not human. A car is not human. A walking car is not human. None are remotely human or anywhere on the way to becoming so. Advanced leg walking robot cars are the small picture, the trees that get the headlines. As a bonus, might we ask what is the big picture forest?
Why would humans have legs? Or wheels?
The short answer is about function. It is doubtful that anyone would agree that humans are cargo delivery vehicles. For whatever function humans have legs, there is no competition with a car.
Gibson & Walk (1960) would argue that self-locomotion helps to develop depth perception. In their study, pre-crawling infants could discern no difference between the shallow side and the deep side in the visual cliff experiment as shown at the beginning of this article. Self-locomoting crawling infants react with fear and refuse to move or be placed near the deep side.
Held & Hein (1963) found similar results with newborn cats. In their study, they tethered a freely moving control kitten with a passively observing test kitten with no control over its motions. Neither kitten could see their own legs and both were kept otherwise in dark conditions with their mothers (as normal for kittens). The control kittens developed depth perception. The test kittens did not - until later, when exposed to normal growing conditions.
Campos, et al. (2000) further explore the link between self-locomotion and broader social, cognitive, and perceptual skills. They noted that crawling babies attend to more distant objects than pre-crawling babies.
Walk, Shepherd, & Miller (2013) revisit the self-locomotion and perception of kittens. In their study, they further separate kittens into mobile, immobile with a passive environment, and immobile with an active moving display. They confirmed that mobile kittens discriminate depth differences, and passive, immobile kittens do not. They also found that immobile kittens with active moving displays developed depth perception. They conclude that it is not merely the mobility factor, but the attention and motivation factor that helps to develop the skills. And tellingly, the study apparatus had the cats on wheels.
In conclusion, it is not the presence or absence of legs or wheels, no matter how advanced. Rather, it is more what the owner chooses to do with them. With the kittens and the babies, this means to what they pay attention perceptually, cognitively, and socially. With the robots, this means to what the human controller, designer, programmer, or engineer pays attention.